L’article montre et discute d’un exemple de NMT avec microphone MEMS répondant à la classe 1 selon la norme CEI 61672-1.
Le développement rapide des microphones MEMS (Micro-Electro-Mechanical Systems) au cours des dix dernières années a permis de les utiliser dans des instruments de mesure du bruit répondant à la spécification CEI 61672-1. Il y a quinze ans, les microphones MEMS disponibles n’offraient qu’une plage dynamique de 60 dB, alors que les microphones MEMS modernes offrent une dynamique de 100 dB. Une plage dynamique aussi large de microphones MEMS, ainsi que leur répétabilité améliorée et leur stabilité à long terme, ont permis le développement de terminaux de surveillance du bruit à faible coût. En particulier, l’un de ces NMT (Svantek SV 307A) offre une plage de mesure linéaire de 30 dBA Leq÷ 128 dBA Peak, ce qui s’avère optimal pour les applications de surveillance du bruit urbain.
Le faible coût des microphones MEMS permet le développement de conceptions innovantes de terminaux de surveillance du bruit à faible coût, dotés de fonctionnalités telles qu’une disposition multi-microphones pour une vérification dynamique du système.
Puisqu’il n’existe pas de standardisation spécifique pour les terminaux de surveillance du bruit, les deux normes utilisées pour construire des terminaux de surveillance du bruit sont la CEI 61672-1 concernant la capacité de l’instrument à mesurer les niveaux sonores et la norme ISO 1996-2 pour les applications de surveillance du bruit.
Voici les caractéristiques NMT essentielles définies par la CEI 61672-1 mentionnées dans cet article : plage de fonctionnement linéaire, réponse en fréquence, caractéristiques directionnelles et plage de fonctionnement en température. D’autres exigences sont associées à l’application de mesure, notamment la stabilité à long terme, la robustesse environnementale, l’alimentation et la communication. L’ISO 1996-2 comporte des critères supplémentaires, tels que le GPS, l’analyse de fréquence et la surveillance des conditions météorologiques (vent, pluie, température, humidité), qui ne sont pas abordés dans cet article.

Le terme « terminal de surveillance du bruit » (NMT) fait référence aux instruments utilisés pour la surveillance continue et automatisée du bruit qui surveillent les niveaux de pression acoustique pondérés A, leurs spectres et toutes les grandeurs météorologiques pertinentes telles que la vitesse du vent, la direction du vent, la pluie, l’humidité, l’atmosphère. stabilité (réf. ISO 1996-2:2017).
Les terminaux de surveillance du bruit qui répondent aux spécifications ISO et CEI sont des appareils plutôt coûteux. Les microphones à condensateur, qui doivent répondre à des exigences supplémentaires pour les contrôles d’étalonnage avec l’actionneur électrostatique, sont l’une des raisons de leur coût élevé. La préoccupation à laquelle il faut également répondre lors de la sélection d’un microphone est sa résistance dans le temps. Ensuite, il y a la stabilité à long terme et la durabilité environnementale, qui sont des facteurs importants dans la sélection des microphones au sommet des fourchettes de prix.
L’apparition des microphones MEMS a brisé la barrière des prix dans la mesure où, en moyenne, un microphone MEMS coûte moins de 5 euros. En plus des économies de coûts NMT, les prix des services de réparation ont également baissé.
L’utilisation des microphones MEMS s’est développée en raison de leur conception polyvalente, de leur plus grande immunité aux interférences radioélectriques (RFI) et électromagnétiques (EMI), de leur faible coût et de leur résilience environnementale. Cette résilience aux conditions environnementales variables est particulièrement importante pour les applications de surveillance acoustique à long terme lors des hivers rigoureux sous zéro et des étés chauds et humides.
Les microphones MEMS (Micro Electrical Mechanical System) se composent de trois parties principales : CAPTEUR (microphone), ASIC et boîtier. Le CAPTEUR et l’ASIC sont emballés ensemble dans une cavité entourée d’un substrat et d’un couvercle.
Une entrée sonore (port acoustique) est présente soit dans le substrat, soit dans le couvercle, et, la plupart du temps, positionnée directement dans la cavité MEMS.
Le CAPTEUR illustré à la figure 1 est un microphone à condensateur polarisé miniaturisé avec une polarité typique de 50 V. Une surface, appelée plaque arrière, est fixe et recouverte par une électrode. L’autre surface, à savoir le diaphragme, est mobile et comporte de nombreux trous, c’est-à-dire des trous acoustiques.
Une onde sonore passant à travers les trous acoustiques de la plaque arrière mettra le diaphragme en mouvement, créant un changement de capacité entre les deux surfaces correspondantes. Celui-ci est converti en signal électrique par le circuit intégré spécifique à une application (ASIC).
Il existe deux types de microphones MEMS : analogiques et numériques. De type analogique, un ASIC contient un convertisseur d’impédance (préamplificateur) et une pompe de charge pour générer une tension de polarisation. L’ASIC du microphone numérique comprend en outre un convertisseur A/D sigma-delta avec sortie PDM. Le format PDM est une entrée standard pour la plupart des codecs disponibles sur le marché (un format PDM modulé en densité d’impulsion est un flux de données à fréquence d’échantillonnage élevée de 1 bit).
Dans cet article, nous aborderons le NMT utilisant un microphone MEMS avec sortie analogique.
La norme CEI 61672-1 exige de fournir un équivalent électrique du microphone pour les tests électriques. Dans le cas des microphones MEMS, il s’agit d’une tâche difficile mais possible.
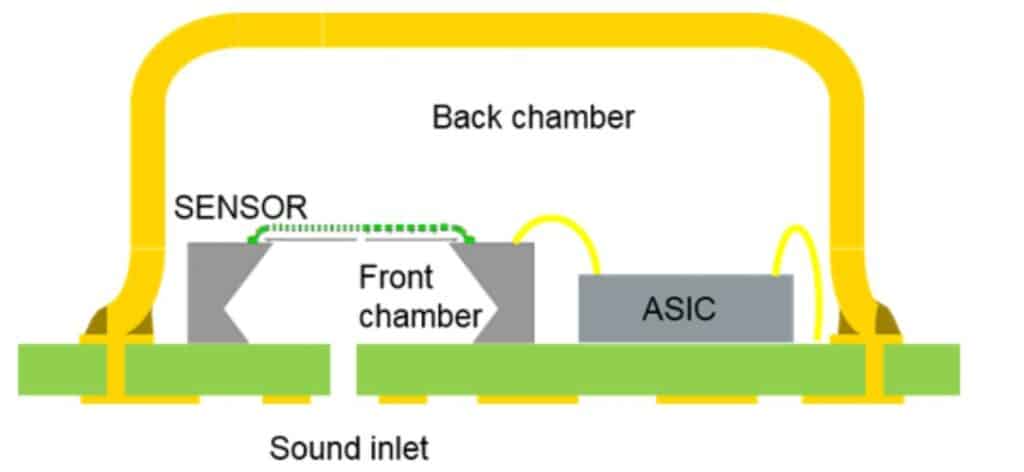
Figure 1. Exemple de construction de microphone MEMS.
Figure 2. Transducteur et ASIC d’un microphone MEMS analogique
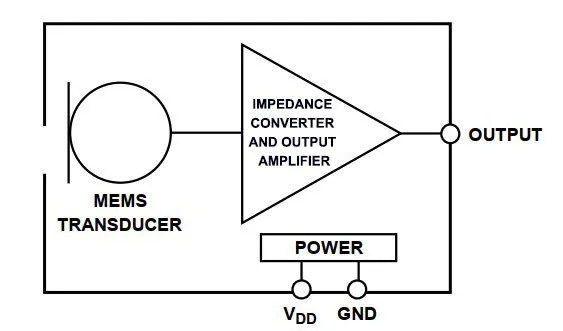
Figure 3. Schéma fonctionnel typique d’un microphone MEMS analogique
Dans cette section, nous comparons les fonctionnalités d’un NTM basé sur MEMS à celles d’un NMT basé sur un microphone à condensateur. Les deux NMT ont été autorisés par le Physikalisch-Technische Bundesanstalt (PTB) pour être conformes à la norme CEI 61672-1 en 2022. Les performances de deux NMT ont été comparées :
Comme le montre la figure 4, le SV 200A NMT utilise quatre microphones MEMS montés sur un côté du boîtier pour détecter la directivité du bruit.

Figure 4. Svantek SV 307A (à gauche) et Svantek SV 200A (à droite)
La mesure typique du bruit extérieur est effectuée dans la plage comprise entre 30 dBA et 125 dBA, ce qui nécessite une plage dynamique de 100 dB (définie ici comme la différence entre le bruit de fond pondéré A et le SPL maximum dans les limites de tolérance).
Le premier type de microphones MEMS (2008) avait une plage dynamique limitée, d’environ 60 dB. La deuxième génération de microphones MEMS (2018) offre une plage dynamique de 100 dB, permettant de les utiliser dans les mesures de bruit dans l’environnement.
Sur n’importe quelle plage de niveaux et à la fréquence indiquée, les écarts des niveaux sonores mesurés par un NMT doivent être conformes à l’acceptation de la CEI 61672-1. La comparaison montre que :
Les spécifications pour les mesures de bruit ambiant sont remplies dans les deux cas par la plage de fonctionnement linéaire.
Les terminaux de surveillance du bruit conformes à la CEI 61672-1 doivent avoir une réponse en fréquence spécifiée pour le son incident sur le microphone provenant d’une direction principale dans un champ acoustique libre ou dans des directions aléatoires.
Les deux terminaux respectent les critères de réponse en fréquence grâce à des filtres de compensation qui améliorent les caractéristiques de fréquence et répondent à la norme CEI 61672-1, comme le montrent les figures ci-dessous.
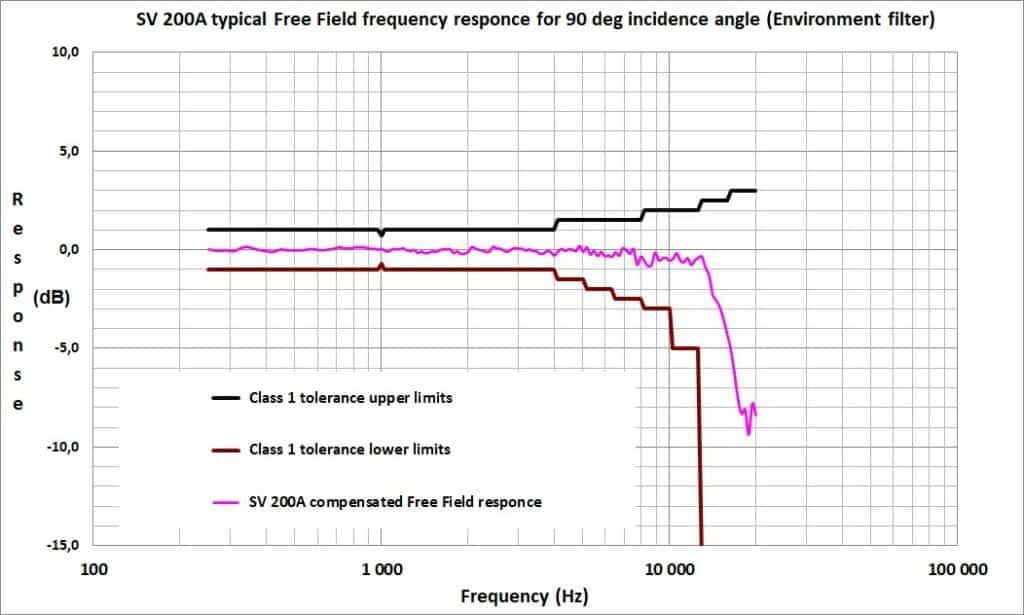
Figure 5. Réponse en fréquence du SV 200A NMT avec un microphone à condensateur.
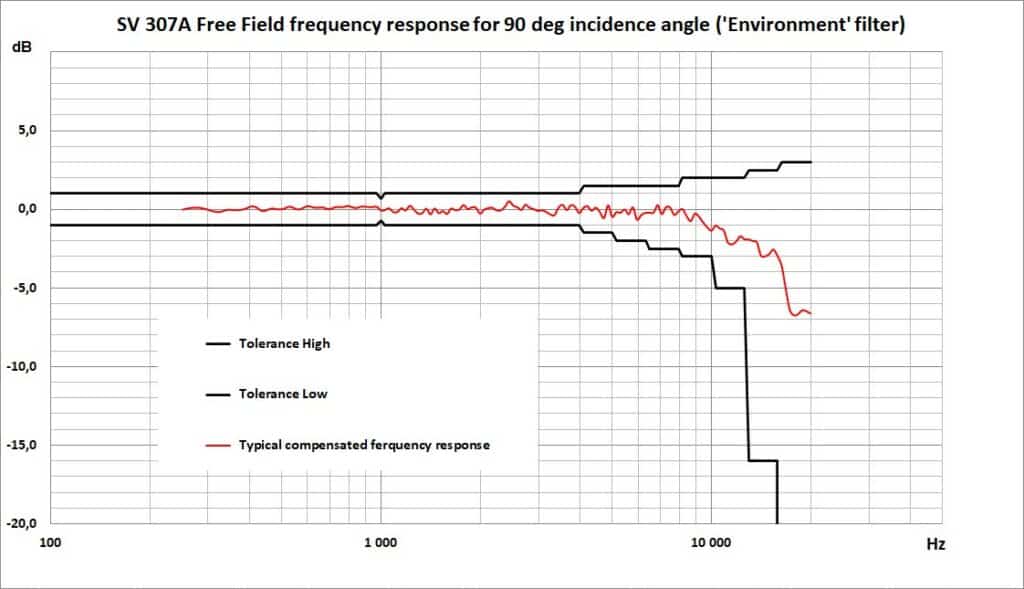
Figure 6. Réponse en fréquence du SV 307A NMT avec microphone MEMS.
Pour toute fréquence comprise dans la gamme NMT, l’objectif de conception de réponse directionnelle est une réponse égale aux sons provenant de toutes les directions d’incidence sonore. La norme CEI 61672-1 fournit des limites d’acceptation pour les écarts par rapport aux objectifs de conception. Pour les sonomètres de classe 1, la fréquence du signal sonore est spécifiée jusqu’à 12,5 kHz et pour les sonomètres de classe 2 jusqu’à 8 kHz. Les figures ci-dessous comparent la réponse directionnelle du NMT avec un microphone à condensateur et un microphone MEMS, tous deux répondant à la spécification CEI 61672-1.
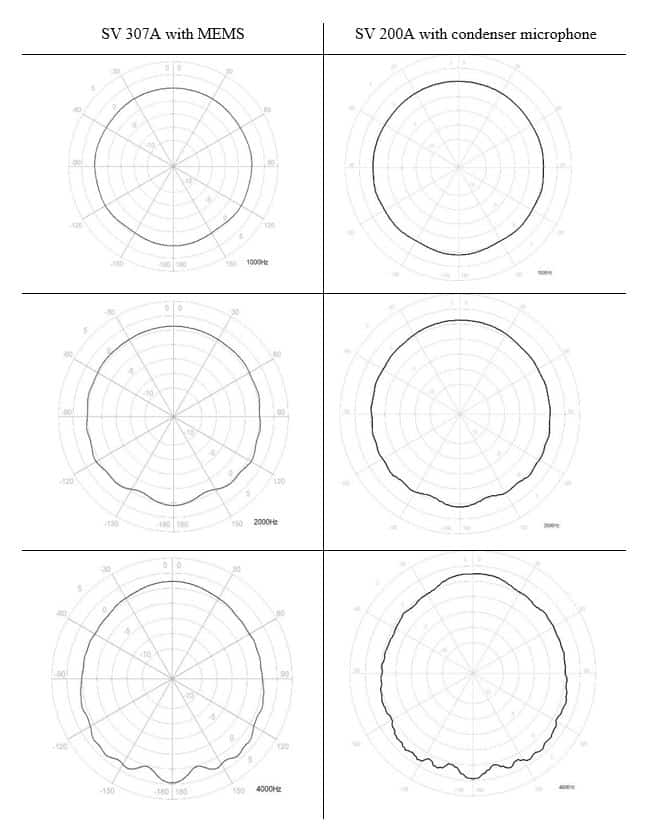
Figure 7. Réponse directionnelle du SV 307A (côté gauche) et du SV 200A (droite)
La norme CEI 61672-1 définit deux niveaux de tolérance pour le bruit extérieur : Classe 1 et Classe 2. Ces plages régissent la plage de température de -10°C à +50°C, ainsi que de 0°C à +40°C. Ce sont des facteurs importants lorsqu’il s’agit respectivement de mesures du bruit ambiant et de surveillance du bruit ambiant.
Dans les mesures réelles, au moins la plage de température pour le NMT ne doit pas être inférieure à
(-10°C) à +50°C, ce qui est dû aux grandes variations de températures lors des mesures à l’extérieur. En pratique, une plage de température de fonctionnement de -20°C à +60°C doit être fournie.
La plage de température de fonctionnement de :
La stabilité à long terme est une considération cruciale lors de l’examen du NMT, car la surveillance du bruit est un type de mesure sans surveillance. Dans le cas d’une surveillance du bruit à long terme, la norme ISO 1996-2 fait référence au contrôle acoustique ISO 20906/Amd1:2013 pour la vérification de la sensibilité NMT. L’ISO exige l’installation d’une vérification automatisée du système qui indiquera si le système fonctionne correctement ou s’il est potentiellement défectueux.
Le SV 200A utilise un contrôle de système classique basé sur un actionneur électrostatique. Cependant, l’utilisation d’un actionneur électrostatique dans les mesures en extérieur est difficile et coûteuse, principalement en raison de la haute tension requise et des conditions environnementales.
Les microphones MEMS ne peuvent pas être testés avec des actionneurs électrostatiques en raison de leur boîtier, mais leur petite taille permet de concevoir un réseau multi-microphones à l’intérieur d’un boîtier de microphone de ½ ».
En utilisant un tel réseau, on peut effectuer une vérification dynamique du système en continu sur la base du signal acoustique réel mesuré. Le concept de vérification dynamique du système utilise une comparaison continue de la sensibilité du microphone. En plus du contrôle dynamique du système, la source de signal acoustique peut être utilisée pour tester le microphone hors ligne (par exemple avec un niveau de 100 dB).
Lorsqu’il s’agit de surveillance du bruit, l’un des facteurs les plus importants est l’alimentation électrique et la communication. Les données doivent être transmises à des serveurs distants dans le type de mesure sans surveillance. La forme de communication la plus populaire est le GSM. Les deux modèles SV 307A et SV 200A utilisent des modems 4G.
Dans de nombreux cas, les lampadaires sont utilisés comme source d’énergie pour le NMT. Dans une telle situation, il est possible qu’il n’y ait pas d’électricité pendant la journée. En conséquence, NMT devrait avoir au moins 24 heures d’autonomie. Avec l’utilisation de MEMS ayant une consommation d’énergie extrêmement faible, il est plus facile et moins coûteux de répondre à ces exigences.
Les dommages causés aux microphones à condensateur classiques par des chocs mécaniques sont l’une des sources les plus coûteuses en matière de mesures de bruit. De par leur construction, les microphones MEMS sont extrêmement robustes et peuvent résister à des chocs jusqu’à 10 000 g (100 000 m/s2).
La surveillance du bruit basée sur des microphones MEMS est très facile à intégrer à d’autres systèmes de surveillance environnementale à faible coût.